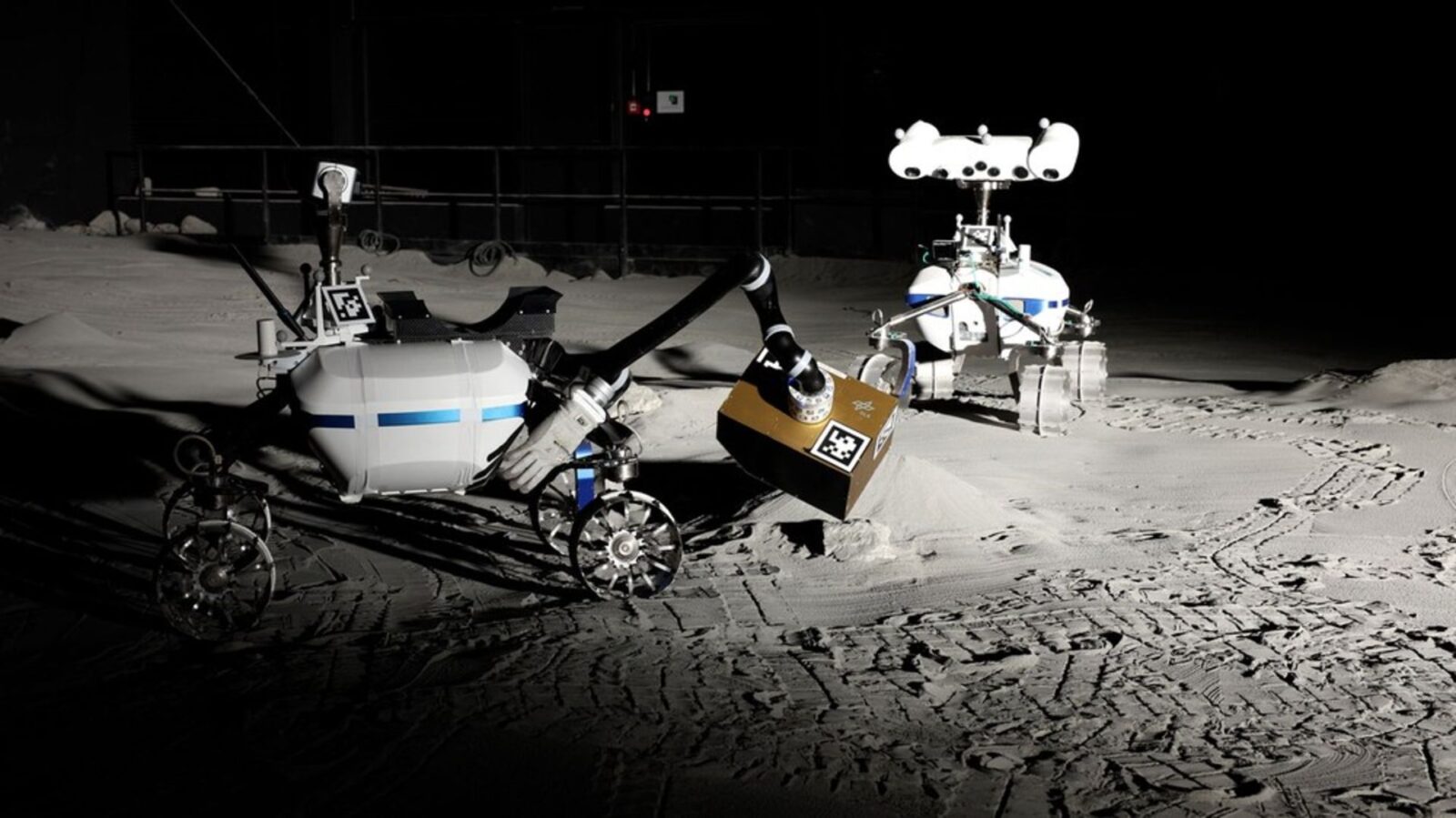
Сцена, словно из мультфильма Pixar, разворачивается на имитации лунной поверхности: два симпатичных робота-ровера ползут по грунту в поисках воды. Один из них, LRU1, своим дизайном даже напоминает знаменитого ВАЛЛ-И.
Однако эта идиллическая картина — не развлечение, а серьезная симуляция, проведенная Немецким аэрокосмическим центром (DLR). Ее цель — помочь будущим астронавтам миссии «Артемида» в критически важной задаче: поиске запасов водяного льда на Луне.
Вода — ключевой ресурс для жизни в космосе. Она нужна не только для питья и приготовления пищи, но и для производства ракетного топлива. Чем больше воды удастся добыть на месте, тем меньше ее придется везти с Земли, что позволит drastically снизить стоимость запусков, где на счету каждый килограмм. Если же роботы смогут заранее разведать месторождения, это сэкономит астронавтам бесценное время для других научных задач.
Легкий ровер LRU1, тот самый «ВАЛЛ-И», проводил картографирование模拟 лунной поверхности на объекте Luna Analog Facility в Кёльне. Панорамная камера на его «голове» позволяла ему «видеть» не только в видимом спектре, но и в длинах волн, недоступных человеческому глазу, что необходимо для поиска минералов и льда.
LRU1 также буксировал прицеп с георадаром, который сканировал грунт на глубине, создавая картину того, что скрыто под поверхностью. Тем временем его напарник, LRU2, следовал за ним, обучаясь и получая данные. После этого LRU2 перешел к активным действиям: его роботизированная рука с лазерным спектрометром провела анализ образцов породы, «выстреливая» по ним лазером (пью-пью!). Поскольку вода ранее уже обнаруживалась в лунных породах — внутри кристаллов вулканического стекла или минеральных зерен — такой лазерный анализ потенциально богатых водой валунов может оказаться крайне важным.
Работа в суровых лунных условиях требует мобильности и комбинирования различных методов. «Сочетание разных технологий дает нам преимущества в изучении поверхности и того, что скрыто под ней», — пояснила Николь Шмитц, планетолог из Института космических исследований DLR. Эта миссия, ставшая первой проверкой технологий от нескольких участников проекта, показала, что «все элементы системы работают».
Шмитц руководила кампанией «Polar Explorer», в рамках которой и тестировались роверы. Предварительные результаты обнадеживают: роботы успешно обнаружили водяной лед, необходимый астронавтам. Сейчас ученые детально изучают собранные данные, чтобы подготовиться к следующему этапу тренировок. Информация с этих испытаний будет дополнена данными, полученными в 2022 году, когда те же роверы ползали по склону вулкана Этна.
Новая лунная миссия включала в себя несколько сложных участков, в том числе имитацию лавовой пещеры. С поиском воды тоже возникли трудности: часть запасов была обнаружена только с помощью заранее проложенной сети сеймических кабелей, скрытых под трехметровым слоем реголита. Искусственно созданный мини-лунотрясение вызвало вибрации, которые и выявили сигнал, указывающий на присутствие H₂O.
Хотя точная дата реального полета этой команды роботов еще не назначена, представители надеются, что проект «Polar Explorer» будет выбран для будущей миссии посадочного модуля «Argonaut». «Аргонавт» — это концепт посадочного модуля от Европейского космического агентства (ESA), частью которого является DLR. Названный в честь знаменитых аргонавтов из древнегреческих мифов, которые плыли на корабле «Арго» в поисках золотого руна, лунный «Аргонавт» отправится на поиски не менее ценного ресурса — воды.
Руководство ESA надеется запустить первую миссию «Argonaut» уже в 2031 году в поддержку программы «Артемида». Модуль доставит на Луну критически важные технологии для навигации, энергоснабжения и телекоммуникаций, прокладывая путь для роботов-разведчиков и будущих человеческих экспедиций.
В нашем Telegram‑канале, вы найдёте новости о непознанном, НЛО, мистике, научных открытиях, неизвестных исторических фактах. Подписывайтесь, чтобы ничего не пропустить.
Поделитесь:








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Оставьте Комментарий